自研智能网联三相映射综合交通实验教学平台投入使用
发表时间:2023-11-01
突破三相数据同步、数字栾生体跨平台交互、平台可信度等问题,建设智能网联三相映射综合交通实验教学平台,可在统一的交通场景下同时运行自动驾驶车辆(AV)、仿真车辆(SV)模拟驾驶车辆(MV)。
系统具备如下核心功能特色:
1、实现了自动驾驶车辆域控制器AV(Autonomous Vehicle)、驾驶模拟器控制的MV(Manual Vehicle)、TESS NG仿真软件生成的背景交通流SV(Simulation Vehicle)三相车流在同一模拟环境实时交互;
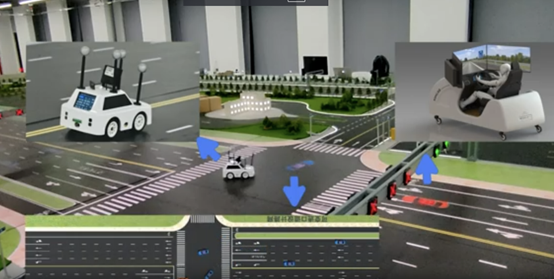
2、构建了“虚实融合”1:20缩尺实验台,实现了AV小车,MV车辆以及背景仿真SV车辆三相交互;
3、 可支撑自动驾驶算法测试、多车协同测试、驾驶员心理生理测试、自动驾驶能力测评等多种测试形式和功能开发;
4、 面向未来人机混驾、车路协同等复杂场景,可提供真实路网和交通流、“人在环路”多车集群交互能力以及全受控实验条件,支持人机混驾,车路协同等前沿技术探索。